Selected Projects
🚗 Autonomous Driving with Reinforcement Learning
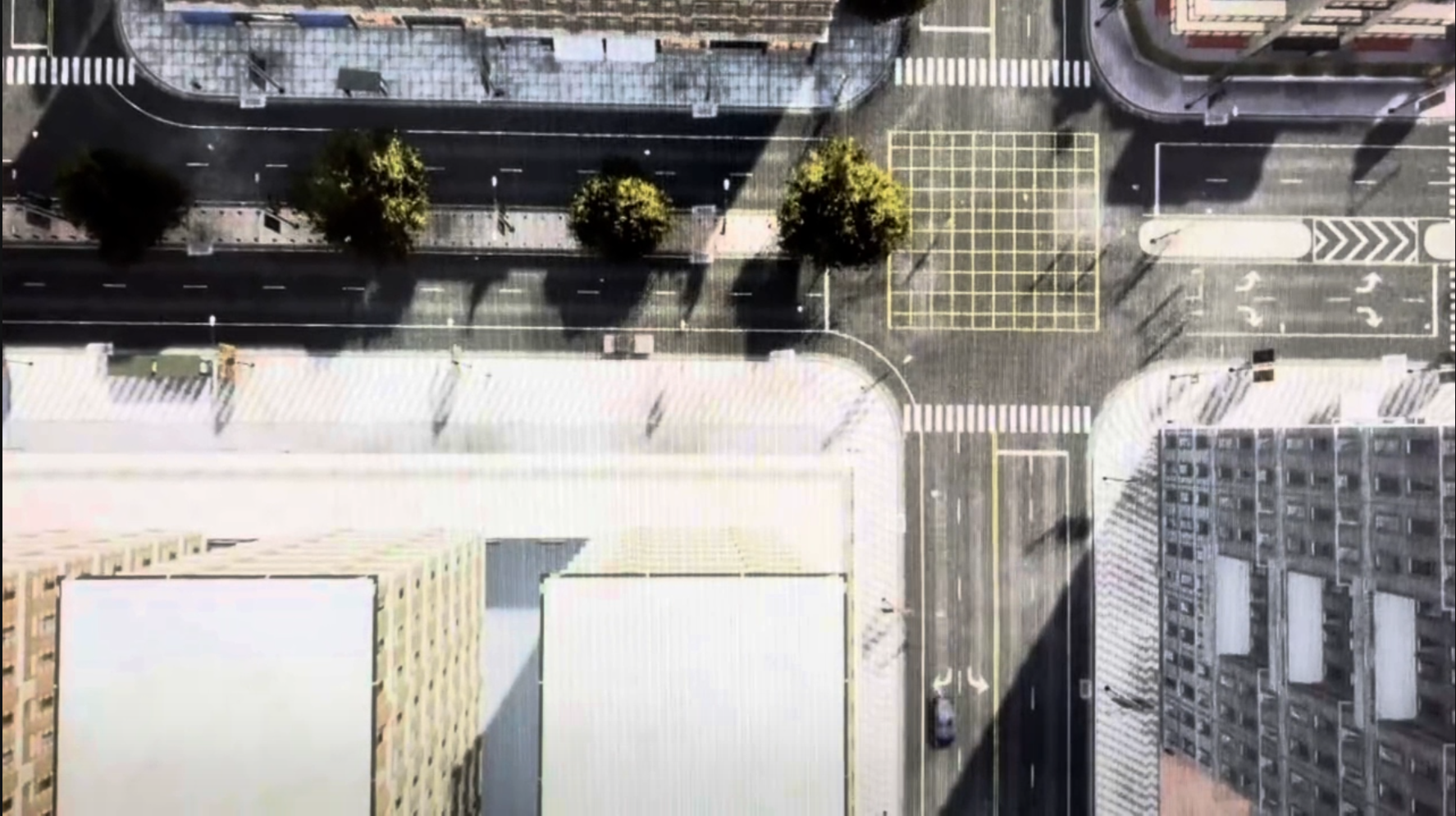
Keywords: PPO · CARLA · Multi-Agent Learning · Distributed Training
This project focuses on developing a reinforcement learning-based autonomous driving framework in high-fidelity simulation environments.
- Built on the CARLA simulator to model realistic urban driving scenarios
- Designed a multi-modal observation space combining visual input, vehicle state, and route information
- Implemented Proximal Policy Optimization (PPO) for policy learning
- Introduced multi-agent adversarial training to improve robustness in dynamic traffic environments
- Integrated distributed sampling and training using Ray RLlib to accelerate convergence
Highlights
- Improved training efficiency through parallelized experience collection
- Enhanced policy robustness under complex multi-vehicle interactions
- Designed physically-informed reward functions for stability and controllability
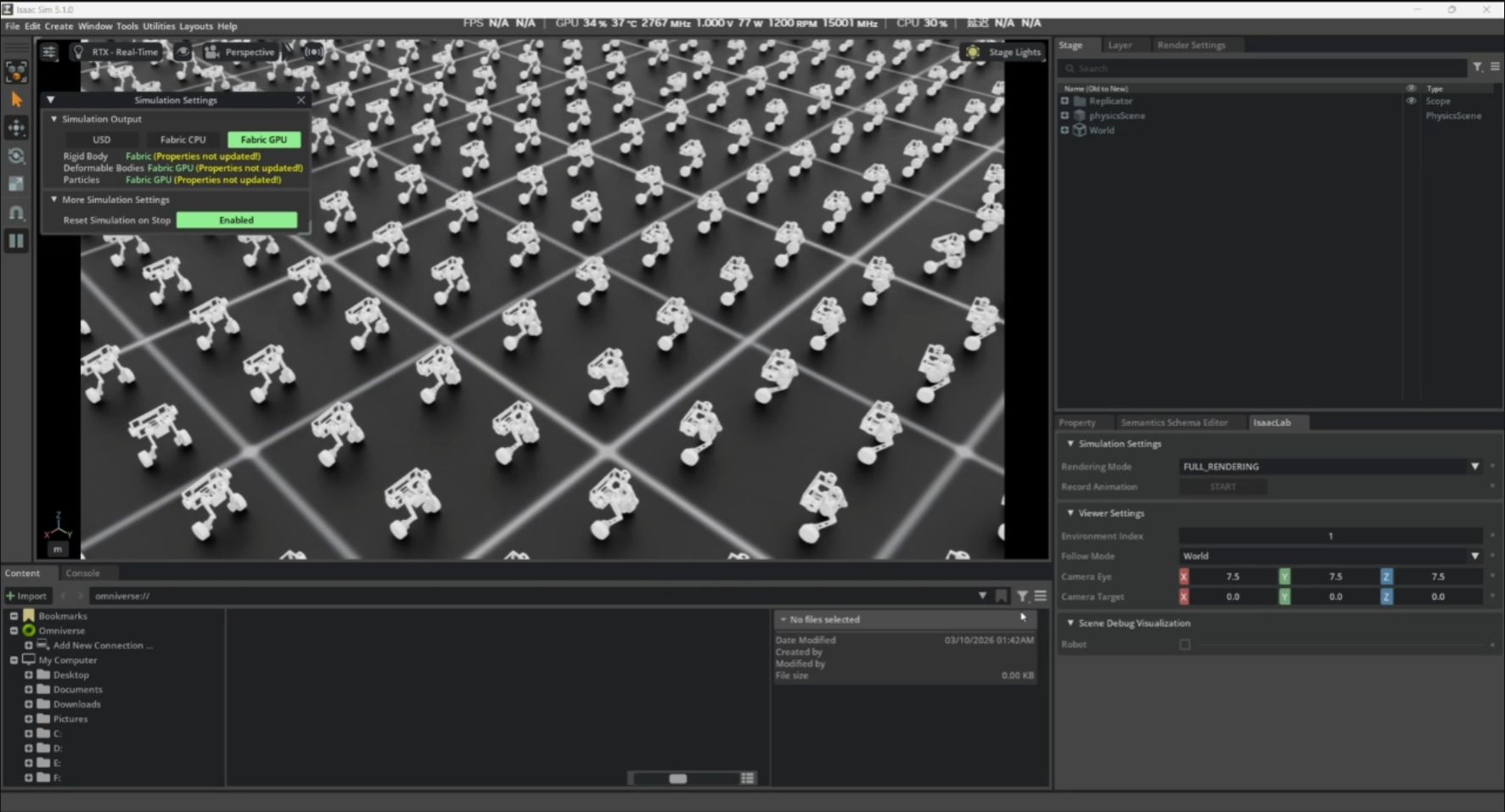
🤖 Humanoid Robot Locomotion with Tactile Feedback
Keywords: Reinforcement Learning · Tactile Sensing · Gait Optimization · Sim-to-Real
This project explores reinforcement learning for humanoid locomotion with explicit modeling of physical contact feedback.
- Developed a learning framework incorporating foot pressure distribution from tactile sensors (e-skin)
- Designed reward functions based on contact stability and force distribution
- Modeled the relationship between physical interaction and control policy optimization
- Investigated sim-to-real transfer by embedding physically meaningful feedback signals
Highlights
- Improved locomotion stability through contact-aware learning
- Bridged the gap between simulation and real-world dynamics
- Emphasized physically grounded policy learning rather than purely data-driven strategies
🦿 Wheel-Legged Robot Control (Course Project)
Keywords: Hybrid Locomotion · Dynamics Modeling · Control System Design
This course project focuses on the modeling and control of a wheel-legged robotic system.
- Built a dynamic model of a wheel-legged robot considering coupled motion constraints
- Designed control strategies for stable locomotion under hybrid motion modes
- Implemented trajectory tracking and posture stabilization
- Analyzed system behavior under different motion conditions
Highlights
- Developed understanding of hybrid locomotion systems
- Combined classical control with system modeling
- Strengthened intuition on physical constraints in robotic systems
💡 Research Direction
My current research interest lies in:
- Reinforcement learning for control optimization
- Physically grounded learning systems
- Sim-to-real transfer in embodied intelligence
- Multi-agent interaction and adaptive optimization
I aim to develop intelligent systems that integrate perception, decision-making, and physical consistency, enabling robust performance in real-world environments.