项目经历
🚗 基于强化学习的自动驾驶决策框架
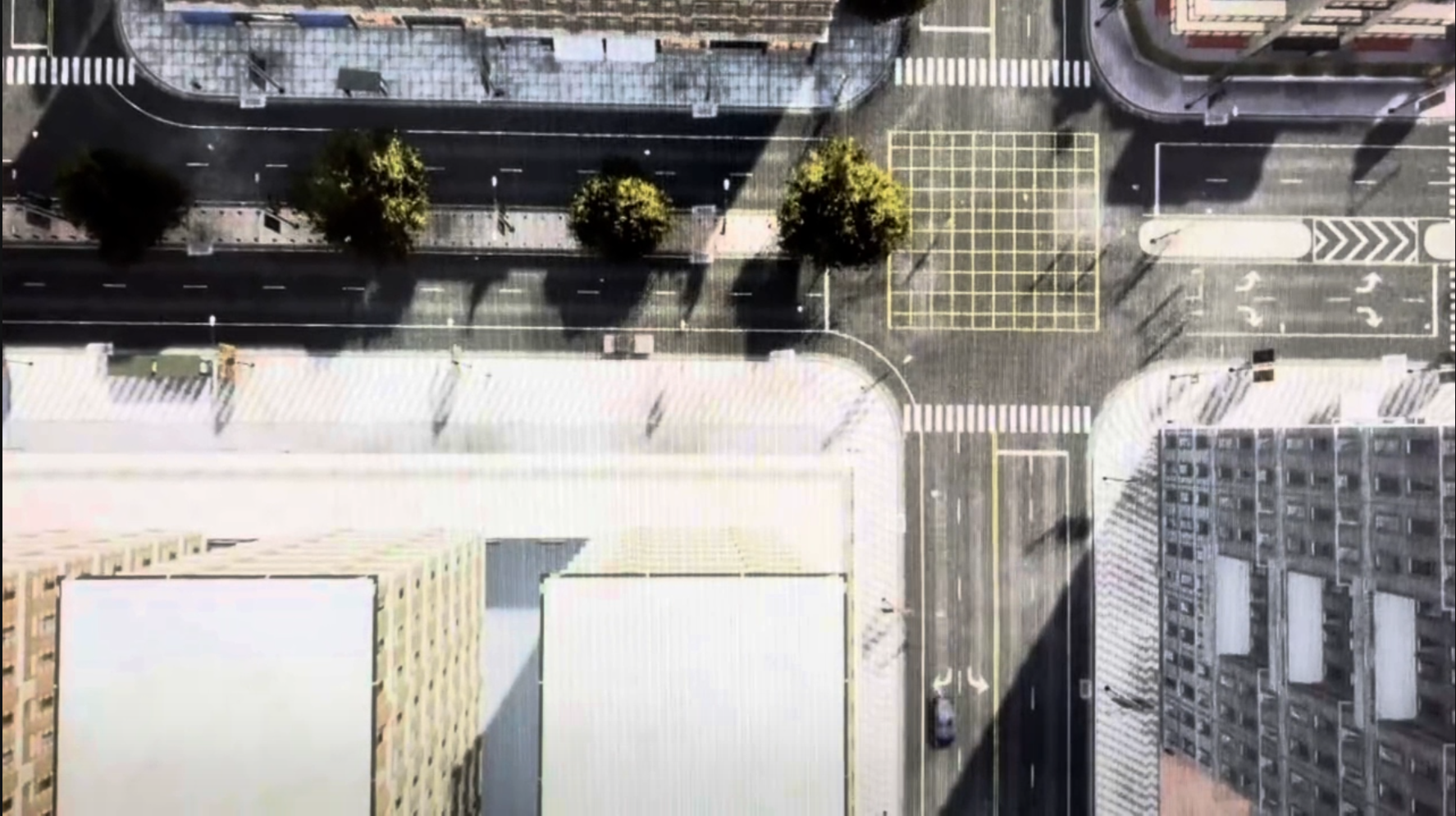
关键词: PPO · CARLA · 多智能体 · 分布式训练
本项目基于高保真仿真环境,构建面向复杂交通场景的自动驾驶强化学习框架。
- 基于 CARLA 搭建城市级自动驾驶仿真环境
- 构建融合视觉、车辆状态与路径信息的多模态观测空间
- 采用 PPO(Proximal Policy Optimization)进行策略学习
- 引入多车辆对抗学习机制,提升策略在动态环境中的鲁棒性
- 基于 Ray RLlib 实现分布式采样与训练,加速模型收敛
项目亮点
- 通过并行化采样显著提升训练效率
- 在复杂多车交互场景下提升策略稳定性与泛化能力
- 设计融合动力学约束的奖励函数,提高控制可行性
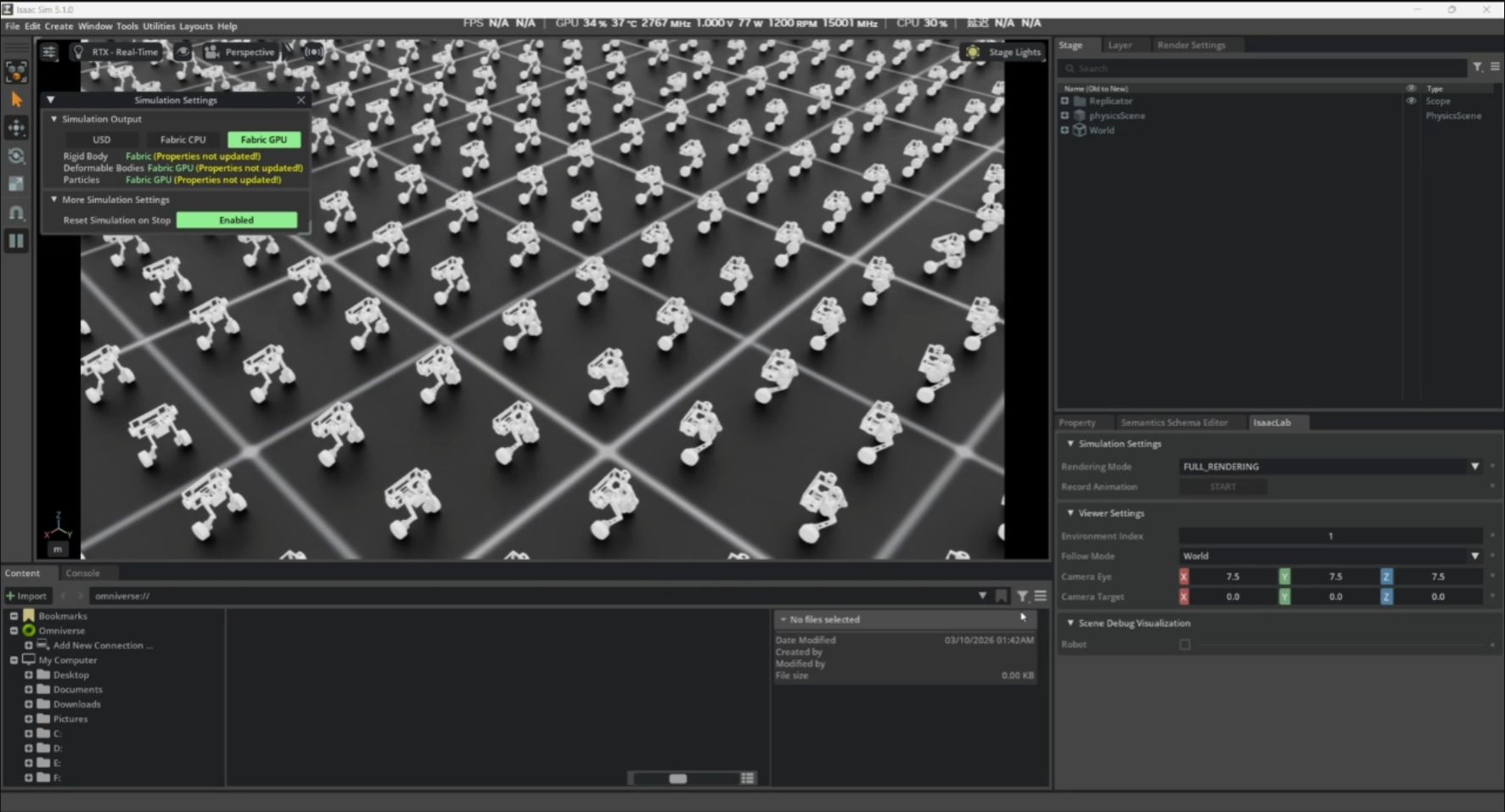
🤖 融合触觉反馈的人形机器人步态优化
关键词: 强化学习 · 触觉感知 · 步态优化 · Sim-to-Real
本项目面向人形机器人动态行走问题,探索融合物理接触信息的强化学习方法。
- 构建基于足底压力分布(电子皮肤)的触觉反馈建模方法
- 将接触稳定性与力分布引入奖励函数设计
- 建立“物理接触—反馈建模—策略优化”的学习闭环
- 探索引入物理约束信息以缩小仿真与现实之间的差距
项目亮点
- 利用触觉信息显著提升步态稳定性
- 强化学习过程显式引入物理接触约束
- 为具身智能中的 sim-to-real 问题提供思路
🦿 轮足机器人控制与动力学建模(课程设计)
关键词: 轮足混合运动 · 动力学建模 · 控制系统
本课程设计围绕轮足机器人系统,开展动力学建模与控制方法研究。
- 建立轮足机器人动力学模型,分析耦合运动特性
- 设计稳定运动控制策略,实现多模态运动切换
- 实现轨迹跟踪与姿态稳定控制
- 分析不同运动工况下系统响应特性
项目亮点
- 加深对混合运动机器人系统的理解
- 将动力学建模与控制方法相结合
- 强化对物理约束与控制策略关系的认识
💡 研究方向
目前我的研究主要聚焦于:
- 强化学习在控制优化中的应用
- 融合物理约束的学习方法(Physically-Grounded Learning)
- 具身智能系统中的 sim-to-real 问题
- 多智能体交互与自适应优化机制
我希望构建能够实现感知—决策—控制闭环的智能系统,使其在复杂真实环境中具备稳定性与泛化能力。